
GENERAL INQUIRIES
info@forward.oneMARKETING INQUIRIES
media@forward.oneINVESTOR RELATIONS
ir@forward.one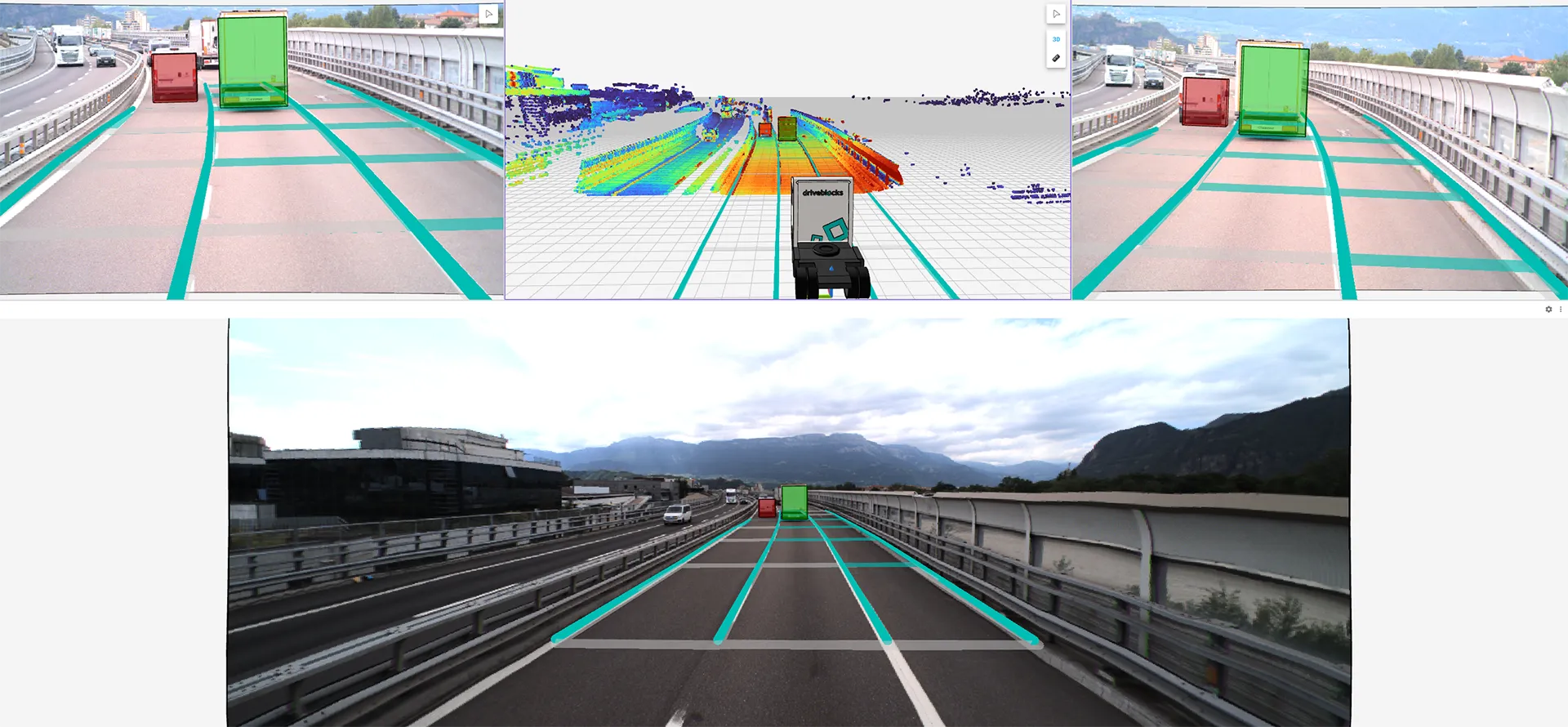
Autonomy works in controlled environments. However, it fails in the real world.
Off-road industries like agriculture, construction, mining, and defense, operate in unstructured, unpredictable terrain. Edge cases are the norm. Reliable perception, real-time AI deployment on edge devices, and safety-critical software certification remain the key bottlenecks preventing large-scale adoption.
Labor shortages and operational pressure are accelerating demand. But without robust perception and compute efficiency, autonomy cannot scale.
driveblocks was founded to solve this constraint.


We led the seed round because driveblocks address the hardest problem in off-road automation: perception that works everywhere.
The team has developed an environment-agnostic foundational AI model, trained on cross-vertical data and multiple sensor modalities. It runs as a lean architecture on ruggedized, off-the-shelf certified hardware. This reduces compute load, power consumption, and system complexity. By operating across agriculture, construction, mining, and defense, the model learns from diverse edge cases and becomes more robust with every deployment.
This fits squarely within our deeptech thesis: hardware-software integration at the edge, industrial AI with real deployment pull, and defensible technical architecture. We support driveblocks with capital and guidance on dual go-to-market strategy; balancing defense applications with commercial OEM partnerships, and with building out its first commercial leadership hires.



Dr. Alexander Wischnewski
CEO & Co-founder


Automation is inevitable. Reliability is not. The winners in autonomy will be those who solve perception under pressure in all kinds of environments. driveblocks builds the AI infrastructure for machines that feed, build, and protect our world.
Driveblocks is building long-term autonomy infrastructure:









